- AI코딩과정
- 로봇코딩과정
- 창의력교구
- 방문교육(홈스쿨)
- 강사양성과정
- 진로체험교육
- 커뮤니티
- 쇼핑몰
- * 정규교육 과정
- * 심화교육 과정
- * 경진대회 과정



* 심화교육 과정
 home > 로봇코딩과정 > * 심화교육 과정
home > 로봇코딩과정 > * 심화교육 과정
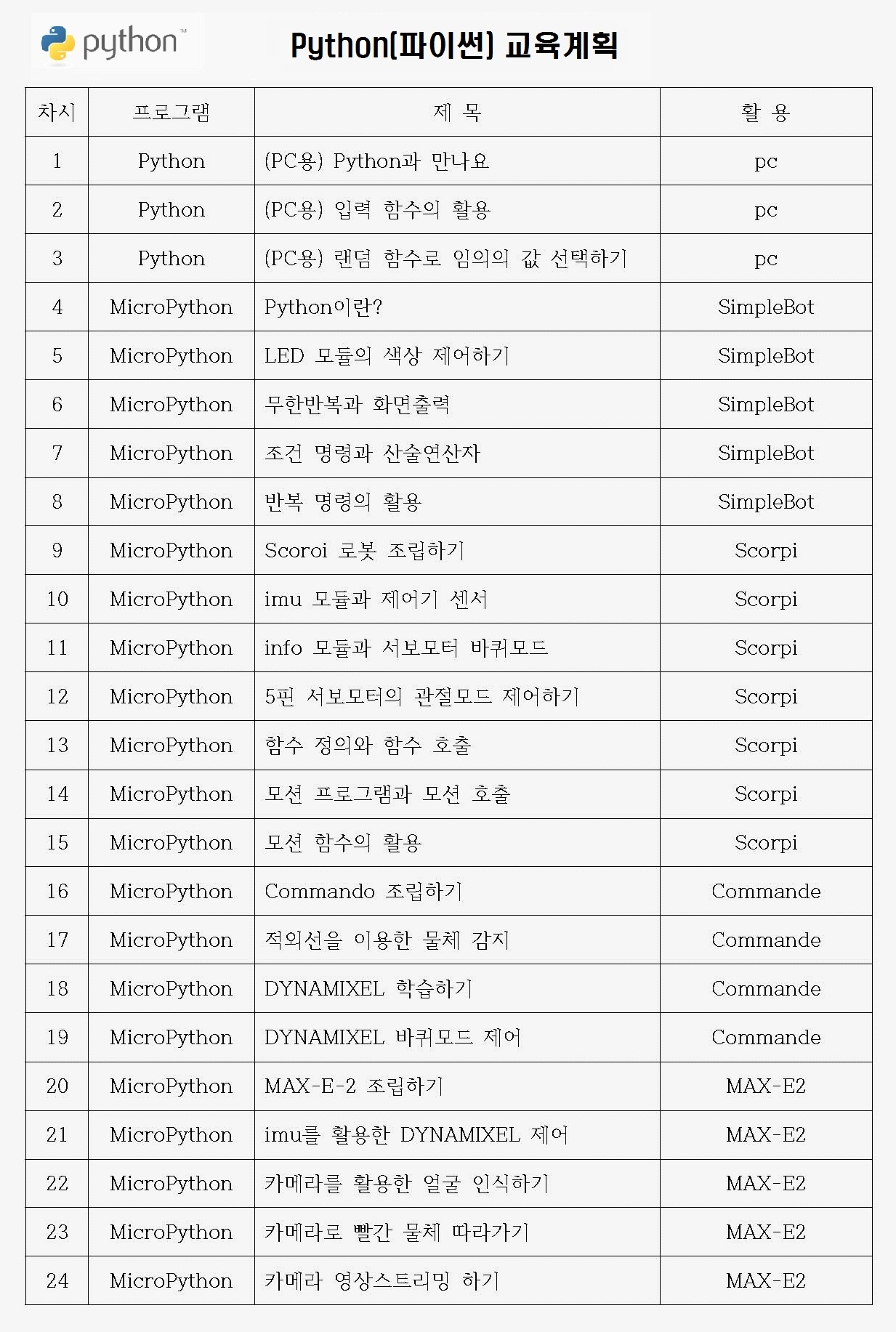
Python 과정 
AI기반 다과절과정은 로보티즈 엔지니어Kit를 활용하여 교육(Education), 취미(Hobby)는 물론 이를 활용한 전시/공연(Entertainment) 및 대회(Competition)를 준비할 수 있는 차세대 다관절 로봇키트로, 전자제어, AI, 3D프린팅, 코딩, 비전프로세싱과 매니퓰레이션 등 실제 미래 산업현장에서 요구되는 기술 학습에 적합한 솔루션을 제공합니다.
교육대상 |
고급과정이수자 또는 파스칼PG 이해가능자(면담후 결정) |
실습도구 |
엔지니어Kit1, Kit2 |
교육시간 |
주 1회 1회 90분 월 4회 |


- 상세정보
- 교육시간

QUICK MENU








|
설립일 : 2009 년 12월 4일 대표이사 : 권오필 개인정보책임자 : 권오필 이메일 : mirobot@korea.com 사업자등 록번호 :144-81-30759  통신판매업신고 : 제2014-경기성남-1553호 통신판매업신고 : 제2014-경기성남-1553호주소 : (13597) 경기도 성남시 분당구 내정로 173번길 49(수내동33-2)궁전프라자209호 대표전화 : 031-719-4523 (전국공통) |